Quadrilaterals
此前我们的渲染器只支持球体这一种primitive,现在是时候添加四边形了。
6.1 Defining the Quadrilateral
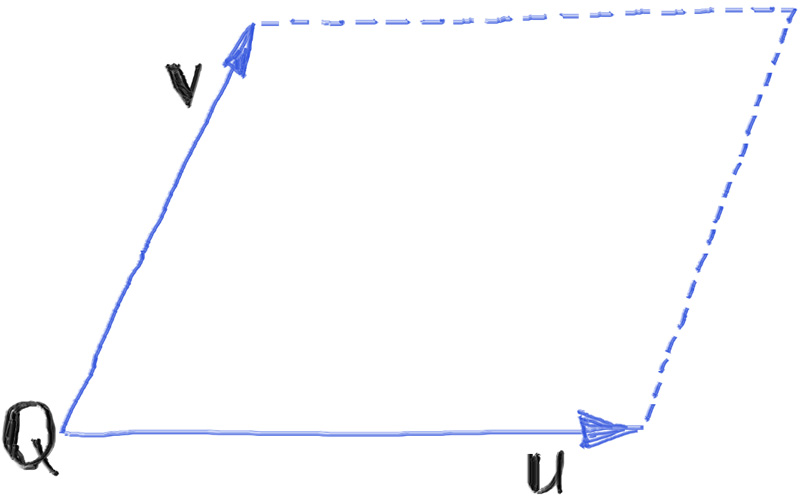
虽然在代码中我们会以quad来命名新的primitive,但从技术上来说,我们实际要实现的是平行四边形。我们通过以下三个参数定义平行四边形:
- Q:起始的一角
- u:表达平行四边形其中一条边的向量
- v:表达平行四边形另一条边的向量
四边形是平的,所以如果四边形位于XY、YZ或ZX平面上,它们的AABB将在一个轴向上具有零厚度。这可能导致光线相交的数值问题。这里的数值问题主要是由于浮点数精度导致的相交检测失败等情况。
为了避免这些问题,我们可以在边界框的任何零厚度维度上增加一个小的填充。这样做不会改变四边形与其他几何体的实际相交情况,只是扩展了边界框,使其在所有维度上都有一个最小的正厚度,从而避免数值问题的出现。这样,边界框仍然是对四边形的一个粗略近似,但它变得更稳定、更可靠。
首先,我们需要添加一个函数,用于扩宽interval的范围:
1
2
3
4
5
6
7
8
9
10
11
12
13
class interval
{
public:
...
interval expand(double delta) const
{
auto padding = delta / 2;
return {min - padding, max + padding};
}
static const interval empty, universe;
};
接下来,我们来修改aabb类,避免出现某个轴向上AABB存在0厚度的情况:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
class aabb
{
public:
...
aabb(const interval& x, const interval& y, const interval& z) : x(x), y(y), z(z)
{
padToMinimums();
}
aabb(const point3& a, const point3& b)
{
// here we treat a and b as extrema for the bounding box, and we sort them manually
// thus we just dont require them to be particular minimum-maximum order
x = a[0] <= b[0] ? interval(a[0], b[0]) : interval(b[0], a[0]);
y = a[1] <= b[1] ? interval(a[1], b[1]) : interval(b[1], a[1]);
z = a[2] <= b[2] ? interval(a[2], b[2]) : interval(b[2], a[2]);
padToMinimums();
}
...
static const aabb empty, universe;
private:
void padToMinimums()
{
// adjust the AABB so that no side is narrower than some delta,
// padding if necessary
double delta = 0.0001;
if (x.size() < delta) x = x.expand(delta);
if (y.size() < delta) y = y.expand(delta);
if (z.size() < delta) z = z.expand(delta);
}
};
现在我们可以创建quad类,和sphere类一样,从hittable类中派生。我们可以留意下构造四边形AABB的方式,我们分别根据四边形对角线上的两个点构造一个AABB,然后再使用AABB的构造函数,将两个AABB合并为一个:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
#ifndef QUAD_H
#define QUAD_H
#include "rayTracing.h"
#include "hittable.h"
class quad : public hittable
{
public:
quad(const point3& Q, const vec3& u, const vec3& v, shared_ptr<material> material)
: Q(Q), u(u), v(v), material(std::move(material))
{
setBoundingBox();
}
virtual void setBoundingBox()
{
// compute the bounding box of all four vertices
auto bboxDiagonal1 = aabb(Q, Q + v + u);
auto bboxDiagonal2 = aabb(Q + u, Q + v);
bbox = aabb(bboxDiagonal1, bboxDiagonal2);
}
aabb boundingBox() const override {return bbox;}
bool hit(const ray& r, interval tInterval, hitInfo& info) const override
{
return false; // to be implemented
}
private:
point3 Q;
vec3 u, v;
shared_ptr<material> material;
aabb bbox;
};
#endif
6.2 Ray-Plane Intersection
我们解决光线与四边形相交检测的思路如下:
- 找到四边形所在的平面
- 判断光线是否与该平面相交
- 如果相交,我们再判断相交点是否在四边形内部
我们首先来解决第二个问题。实际上,光线与平面相交的思路与光线与球体相交的思路相同,甚至要更加简单。
在数学上,平面是所有满足以下这个隐式方程的点的集合:
\[Ax + By + Cz = D\]其中,ABCD是常数,xyz是点的坐标。在计算机图形学中,我们也可以使用向量来理解这个式子:平面的法向量$n=(A,B,C)$与一个表示平面上一点的位置的向量$v=(x,y,z)$的点积:
\[\mathbf{n} \cdot \mathbf{v} = D\]我们假设该点同样是光线与平面的交点,那么我们将光线的参数方程代入,就得到了一个关于t的一个等式:
\[t = \frac{D - \mathbf{n} \cdot \mathbf{P}}{\mathbf{n} \cdot \mathbf{d}}\]解得t并代入到射线方程中,我们就得到了光线与平面的交点。需要注意的是,如果光线与平面平行,则等号右侧分式的分母为0。
实际上光线与三角形、圆形的相交问题也可以通过光线与平面的相交解决。
6.3 Finding the Plane That Contains a Given Quadrilateral
首先我们先明确一下问题:已知一个平行四边形其中一个顶点的位置,以及相邻两边的向量,求平行四边形所在的平面。
回想平面的隐式方程:$Ax+By+Cz=D$,其中ABC代表平面法线,我们可以通过求平行四边形两个邻边向量之间的叉积求得,即可得ABC。此外我们还已知平行四边形的一个顶点,该点毫无疑问在平面上,我们再代入到平面的方程中就可以求得D。
我们将平面的参数也添加到quad类:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
class quad : public hittable
{
public:
quad(const point3& Q, const vec3& u, const vec3& v, shared_ptr<material> material)
: Q(Q), u(u), v(v), material(std::move(material))
{
// calculate the plane where the quad lies on
vec3 n = cross(u, v);
normal = unitVectorLength(n);
D = dot(normal, Q);
setBoundingBox();
}
...
private:
point3 Q;
vec3 u, v;
shared_ptr<material> material;
aabb bbox;
// plane parameters
vec3 normal;
double D;
};
接下来,我们补充完整quad::hit(),也就是使用前面我们推导的公式,计算出t,从而得到光线与平面的相交点:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
class quad : public hittable
{
public:
...
bool hit(const ray& r, interval tInterval, hitInfo& info) const override
{
double divisor = dot(normal, r.direction());
// no hit if the ray is parallel to the plane
if (fabs(divisor) < 1e-8) return false;
// return false if the hit point parameter t is outside the ray interval
double t = (D - dot(normal, r.origin())) / divisor;
if (!tInterval.contains(t)) return false;
point3 intersectionPoint = r.at(t);
info.t = t;
info.position = r.at(t);
info.material = material;
info.setNormalDirection(r, normal);
return true;
}
private:
...
};
6.4 Orienting Points on The Plane
现在,我们能够已经能够计算出光线与平面的交点,但是这个交点可能在平面的任意位置上,可能在四边形外部,也可能在四边形内部。想要判断一个点是否在四边形中,并将平面的纹理坐标分配给交点,我们需要在平面上定位这个交点。
为了实现交点的定位,我们需要构建出平面的coordinate frame,从而能够在平面上定位任意一点。由于平面是2D的,我们只需要一个平面的原点Q与两个基向量u和v。通常而言,构建坐标系要求基向量是相互垂直的,但是这样做是为了能够将坐标系扩展到整个空间。但是对于我们此处的用途而言(定位平面上一点),我们只要求两个基向量不相互平行即可,实际上也就是四边形已知的两个向量u和v。
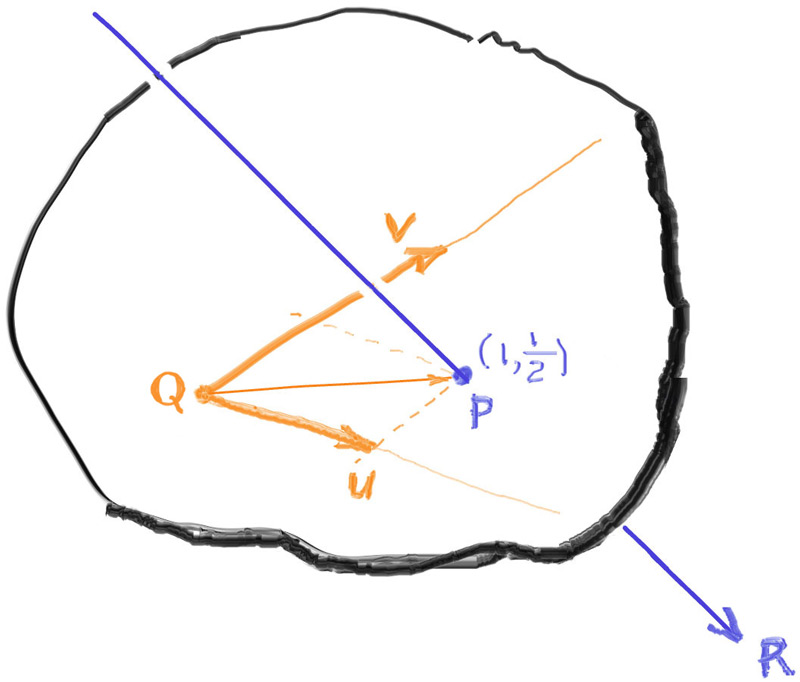
我们以上图为例,在平面的UV坐标系中,光线R与平面的交点P的坐标为(1, 1/2)。
而在更一般的情况中,我们需要找到两个标量,从而有
\[\mathbf{P} = \mathbf{Q} + \alpha \mathbf{u} + \beta \mathbf{v}\]为了简化计算,我们引入一个权重向量w:
\[\mathbf{w} = \frac{\mathbf{n}}{\mathbf{n} \cdot (\mathbf{u} \times \mathbf{v})} = \frac{\mathbf{n}}{\mathbf{n} \cdot \mathbf{n}}\]其中n是法向量,可以通过基向量的叉积得到。权重向量w是一个常量,对于给定的平面我们应该预先计算好:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
class quad final : public hittable
{
public:
quad(const point3& Q, const vec3& u, const vec3& v, shared_ptr<material> material)
: Q(Q), u(u), v(v), material(std::move(material))
{
// calculate the plane where the quad lies on
vec3 n = cross(u, v);
normal = unitVectorLength(n);
D = dot(normal, Q);
w = n / dot(n, n);
setBoundingBox();
}
...
private:
point3 Q;
vec3 u, v;
vec3 w;
shared_ptr<material> material;
aabb bbox;
// plane parameters
vec3 normal;
double D;
};
利用向量投影与叉积的性质,我们可以到两个标量的公式:
\[\displaylines{\alpha = \mathbf{w} \cdot (\mathbf{p} \times \mathbf{v}) \\ \beta = \mathbf{w} \cdot (\mathbf{u} \times \mathbf{p})}\]6.5 Interior Testing of The Intersection Using UV Coordinates
建立了平面的坐标系统,我们可以根据坐标值做平面进行划分,如下图所示:
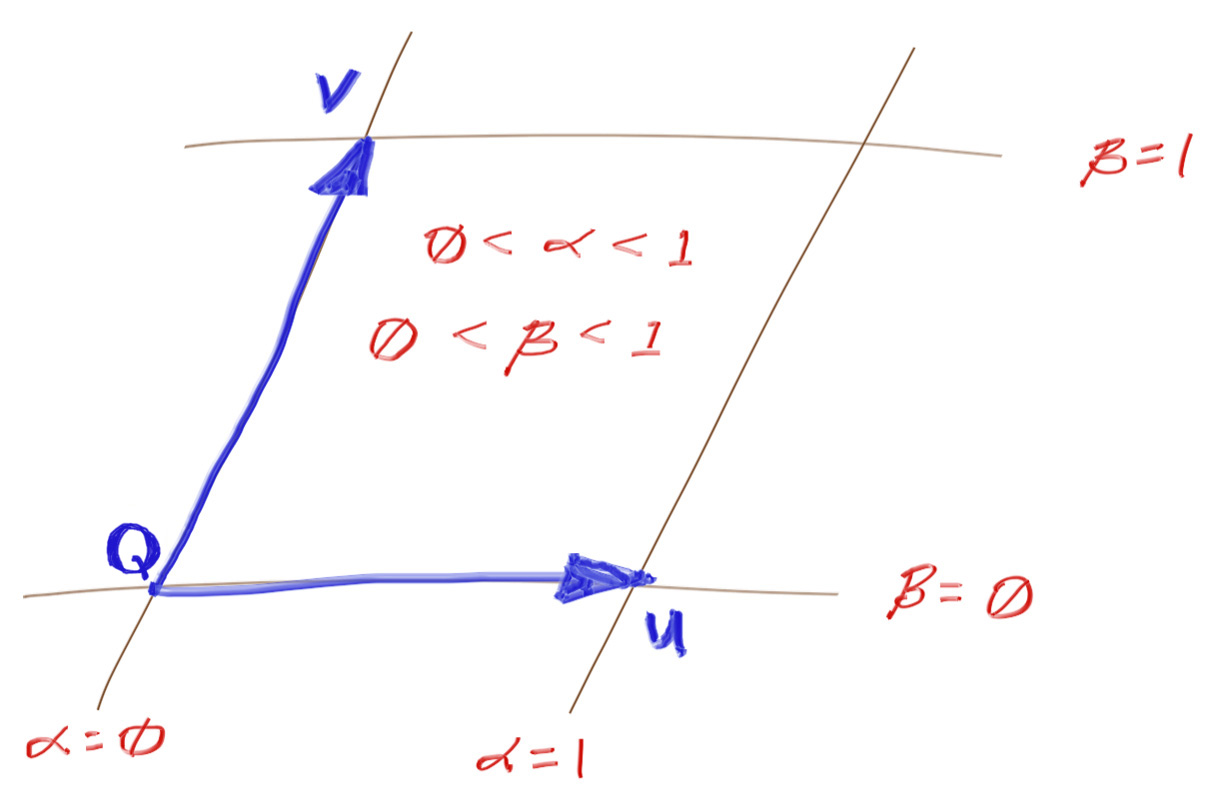
也就是说,要判断平面上一点是否在四边形内,我们只需要进行如下的判定:
- $0 \leq \alpha \leq 1$
- $0 \leq \beta \leq 1$
我最初有些疑惑为什么是这样的判定条件。但是可以想一下,α和β就是依据四边形已知的两个边的向量计算得到的,当点的坐标超出[0, 1]的范围时,实际上也就是超出了四边形的范围。
这样一来,我们就可以将quad类补充完整了。为了代码的简洁, 我们将判断平面上一点是否在四边形内的函数独立处理:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
class quad : public hittable
{
public:
...
bool hit(const ray& r, interval tInterval, hitInfo& info) const override
{
double divisor = dot(normal, r.direction());
// no hit if the ray is parallel to the plane
if (fabs(divisor) < 1e-8) return false;
// return false if the hit point parameter t is outside the ray interval
double t = (D - dot(normal, r.origin())) / divisor;
if (!tInterval.contains(t)) return false;
// determine the hit point lies within the planar shape using its plane coordinates
point3 intersectionPoint = r.at(t);
vec3 planarHitPointVector = intersectionPoint - Q;
double alpha = dot(w, cross(planarHitPointVector, v));
double beta = dot(w, cross(u, planarHitPointVector));
if (!isInterior(alpha, beta, info))
return false;
info.t = t;
info.position = intersectionPoint;
info.material = material;
info.setNormalDirection(r, normal);
return true;
}
virtual bool isInterior(double a, double b, hitInfo& info) const
{
interval unitInterval = interval(0, 1);
// given the hit point in plane coordinates,
// return false if it is outside the primitive,
// otherwise set the hit record UV coordinates and return true
if (!unitInterval.contains(a) || !unitInterval.contains(b))
return false;
info.u = a;
info.v = b;
return true;
}
private:
...
};
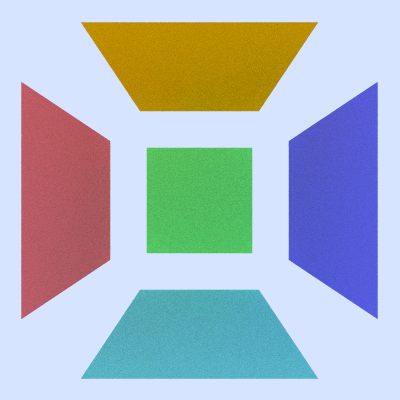
最后,我们再添加一个测试场景:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
#include "rayTracing.h"
...
#include "material.h"
#include "quad.h"
#include "sphere.h"
#include "texture.h"
...
void quads()
{
hittableList world;
// Materials
auto leftRed = make_shared<lambertian>(color(1.0, 0.2, 0.2));
auto backGreen = make_shared<lambertian>(color(0.2, 1.0, 0.2));
auto rightBlue = make_shared<lambertian>(color(0.2, 0.2, 1.0));
auto upperOrange = make_shared<lambertian>(color(1.0, 0.5, 0.0));
auto lowerTeal = make_shared<lambertian>(color(0.2, 0.8, 0.8));
// Quads
world.add(make_shared<quad>(point3(-3,-2, 5), vec3(0, 0,-4), vec3(0, 4, 0), leftRed));
world.add(make_shared<quad>(point3(-2,-2, 0), vec3(4, 0, 0), vec3(0, 4, 0), backGreen));
world.add(make_shared<quad>(point3( 3,-2, 1), vec3(0, 0, 4), vec3(0, 4, 0), rightBlue));
world.add(make_shared<quad>(point3(-2, 3, 1), vec3(4, 0, 0), vec3(0, 0, 4), upperOrange));
world.add(make_shared<quad>(point3(-2,-3, 5), vec3(4, 0, 0), vec3(0, 0,-4), lowerTeal));
camera cam;
cam.aspectRatio = 1.0;
cam.imageWidth = 400;
cam.samplesPerPixel = 100;
cam.maxDepth = 50;
cam.verticalFOV = 80;
cam.lookFrom = point3(0, 0, 9);
cam.lookAt = point3(0, 0, 0);
cam.viewUp = vec3(0,1,0);
cam.defocusAngle = 0;
cam.render(world);
}
int main()
{
switch (5)
{
case 1: bouncingSphere(); break;
case 2: checkeredSphere(); break;
case 3: earth(); break;
case 4: perlinSpheres(); break;
case 5: quads(); break;
default: ;
}
}
渲染中。。。
6.6 Additional 2D Primitives
有注意到quad::setBoundingBox()与quad::isInterior()是虚函数吗?试想,如果我们可以通过坐标来判断平面上一点是否位于平行四边形内,则我们也可以使用这些坐标来确定点是否在其他2D的primitive内,例如三角形、椭圆、甚至是圆环。
我们在这里给出对应的代码,但是暂时不会将这些代码放在渲染器的正式版本的工程中:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
class tri : public quad {
public:
tri(const point3& o, const vec3& aa, const vec3& ab, shared_ptr<material> m)
: quad(o, aa, ab, m)
{}
virtual bool hit_ab(double a, double b, hit_record& rec) const override {
if ((a < 0) || (b < 0) || (a + b > 1))
return false;
rec.u = a;
rec.v = b;
return true;
}
};
class ellipse : public quad {
public:
ellipse(
const point3& center, const vec3& side_A, const vec3& side_B, shared_ptr<material> m
) : quad(center, side_A, side_B, m)
{}
virtual void set_bounding_box() override {
bbox = aabb(plane_origin - axis_A - axis_B, plane_origin + axis_A + axis_B).pad();
}
virtual bool hit_ab(double a, double b, hit_record& rec) const override {
if ((a*a + b*b) > 1)
return false;
rec.u = a/2 + 0.5;
rec.v = b/2 + 0.5;
return true;
}
};
class annulus : public quad {
public:
annulus(
const point3& center, const vec3& side_A, const vec3& side_B, double _inner,
shared_ptr<material> m)
: quad(center, side_A, side_B, m), inner(_inner)
{}
virtual void set_bounding_box() override {
bbox = aabb(plane_origin - axis_A - axis_B, plane_origin + axis_A + axis_B).pad();
}
virtual bool hit_ab(double a, double b, hit_record& rec) const override {
auto center_dist = sqrt(a*a + b*b);
if ((center_dist < inner) || (center_dist > 1))
return false;
rec.u = a/2 + 0.5;
rec.v = b/2 + 0.5;
return true;
}
private:
double inner;
};